
NVIDIA Corp. preliminary materials for Jetson AI Ambassador.

NVIDIA AI Ambassador
😀this page is created to explain my project.😀
called “Botline project” - Botline is our team name.
My project’s real name is “AI-Assisted Safety Systems Using Industrial Internet-of-Things(IIOT)” = “Botline project”
It was produced for the regional development contest. [ x - corps contest ]
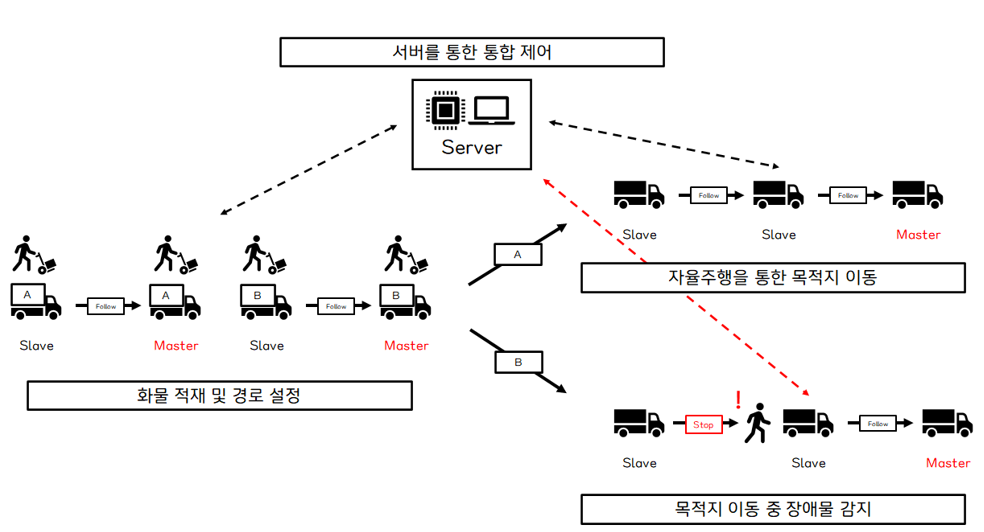
This project is a system for preventing accidents occurring in industrial sites and for faster logistical circulation. So we used a Jetbot for the application test.
Total manual for Botline project is clicked here
Draw a realization map
Testing video of all system
Implemented The project “Botline project”
My part of this project
- implemented Collision Avoidance + Road Following through JETBOT with jetson nano
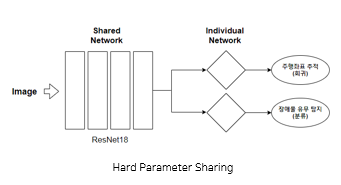
- Jetson Nano Resources are not enough to implement two CNN algorithms at the same time. To solve this problem, The MTL(Multi-Tasking Learning) algorithm was developed.
- MTL is Multi-Tasking Learning. There are two ways of MTL theory. ( 1. Hard Parameter Sharing / 2. Soft Parameter Sharing ). I chose the first method.
![my MTL model Diagram.]()
my MTL model Diagram.
- The shared Network included a Conv, BN, Activation Func, Linear, Dropout, etc
- So our team solves resource problems through this algorithm
- NEXT GIF shows original network vs MTL network performance
![Left: original Resnet-18 network Right: produced MTL network]()
Left: original Resnet-18 network Right: produced MTL network
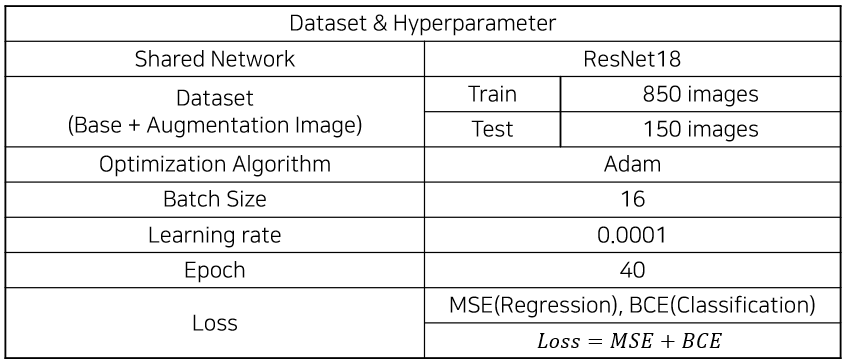
- Training
- Classifciation - used MSELoss
- Regression - used BCELoss
- Optimizer - Adam( LR = 0.001. else value is default. )
![Untitled]()
- Customed Yolov5 with Tensor RT for Object Detection in jetson Xavier
- Pre-selected obstacle images were trained in Yolov5
- Applied various augmentation to obstacle images for improving detection performance
- Applied Tensor RT to Yolov5 for a smooth frame in Jetson Xavier
- RTSP
- Real-Time Streaming Protocol by G-streamer
- open-source protocol
- It was used to transmit videos of Yolov5 in Xavier to the computer. ( for Profiling system. )
- The motion algorithm of each motor
Driving algorithm of Original Resnet-18 model ( Used in the past )
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
#코드의 가장 핵심인 execute 부분. change에 맞추어 값이 변화한다.
def execute(change):
global angle_last, count, left, right
image = change['new']
xy = model_trt(preprocess(image)).detach().float().cpu().numpy().flatten()
x = round(xy[0], 3)
y = round((0.5 - xy[1]), 3)
x_slider.value = x
y_slider.value = y
angle = round(np.arctan2(x, y),3) #radian
if botLine.botLineObject.isStop is False:
#gpio.output(7, gpio.HIGH)
#gpio.output(11, gpio.LOW)
if( y <= 0.001) and ( abs(x) <= 0.2 ) :
count = count + 1
left = max(left - (left * (count * 0.03)), 0)
right = max(right - (right * (count * 0.03)), 0)
if( count >= 15 ):
robot.stop()
left = 0
right = 0
else: # 장애물 x
count = 0
if ( (abs(angle - angle_last) > abs(angle_last)) and ( angle_last != 0) and (abs(angle) > pid_value.value)) :
angle = angle_last + ( angle * diff_slider.value )
pid = round(angle ,2)
if pid > 0 :
left = round(pid * add_motor.value * speed_slider.value + speed_slider.value , 2)
right = round(-pid * dec_motor.value * speed_slider.value + speed_slider.value, 2)
else:
left = round(pid * dec_motor.value * speed_slider.value + speed_slider.value , 2)
right = round(-pid * add_motor.value * speed_slider.value + speed_slider.value, 2)
else:
pid = round(angle ,2) #0.95 etc..
left = round(max(pid, 0)* add_motor.value * speed_slider.value + speed_slider.value , 2)
right = round(max(-pid, 0)* add_motor.value * speed_slider.value + speed_slider.value, 2)
speed_slider.value = speed_gain_slider.value
steering_slider.value = pid
#Global variables
angle_last = angle
robot.left_motor.value = left
robot.right_motor.value = right
else:
robot.stop()
botLine.onUpdate()
execute({'new': camera.value})
Driving Algorithm of MTL model ( present )
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
import time
angle_last = 0.0
left = 0.0
right = 0.0
isStop = False
t0 = time.time()
def execute(change):
global angle_last, left, right, isStop, t0
image = change['new']
result = model(preprocess(image))
xy = result[0].float().cpu().numpy().flatten()
block = result[1].float().cpu().numpy().flatten()
x = round(xy[0], 3)
y = round((0.5 - xy[1]), 3)
x_slider.value = x
y_slider.value = y
block_slider.value = block
angle = round(np.arctan2(x, y),3) #radian
if (botLine.botLineObject.isStop() is False) and (botLine.botLineObject.isWorking() is True):
if block_slider.value >= 0.55:
robot.stop()
isStop = True
left = 0
right = 0
else:
if ( (abs(angle - angle_last) > abs(angle_last)) and ( angle_last != 0) and (abs(angle) > pid_value.value)):
angle = angle_last + ( angle * diff_slider.value )
pid = round(angle ,2)
if pid > 0 :
left = round(pid * add_motor.value * speed_slider.value + speed_slider.value , 2)
right = round(-pid * dec_motor.value * speed_slider.value + speed_slider.value, 2)
else:
left = round(pid * dec_motor.value * speed_slider.value + speed_slider.value , 2)
right = round(-pid * add_motor.value * speed_slider.value + speed_slider.value, 2)
else:
pid = round(angle ,2) #0.95 etc..
left = round(max(pid, 0)* add_motor.value * speed_slider.value + speed_slider.value , 2)
right = round(max(-pid, 0)* add_motor.value * speed_slider.value + speed_slider.value, 2)
steering_slider.value = pid
#전역변수 설정
angle_last = angle
robot.left_motor.value = left
robot.right_motor.value = right
else:
robot.stop()
image_data = image.copy()
circle_color = (0, 255, 0)
if block_slider.value >= 0.55:
circle_color = (0, 0, 255)
image_data = cv2.circle(image_data,
(112 + int(x_slider.value * 112),
224 - int(y_slider.value * 224)), 8, circle_color, 3)
draw_widget.value = bgr8_to_jpeg(image_data)
botLine.onUpdate()
time.sleep(0.001)
execute({'new': camera.value})
- Preprocessing and Augmentation in images ( MTL, Yolov5 )
- Resizing and Adjust Contrast
- Adjust saturation, contrast, brightness, exposure,
- Add gaussian noise
- Grey_scale to Reduce the effect on brightness
More Augmentation and Preprocessing were applied to the original image and disappeared.
Next plan
Future plans for developing project
- developing algorithm the management of swarm vehicles ( Master-Slaves position )
- Planning to change the network ( Resnet-18 ( MTL ) → EfficientNet ( MTL ) ) ( EfficientNet was developed in 2020, It works well with fewer resources than Resnet-18 )
- Planning to change the collecting method the image data through the teacher-student method
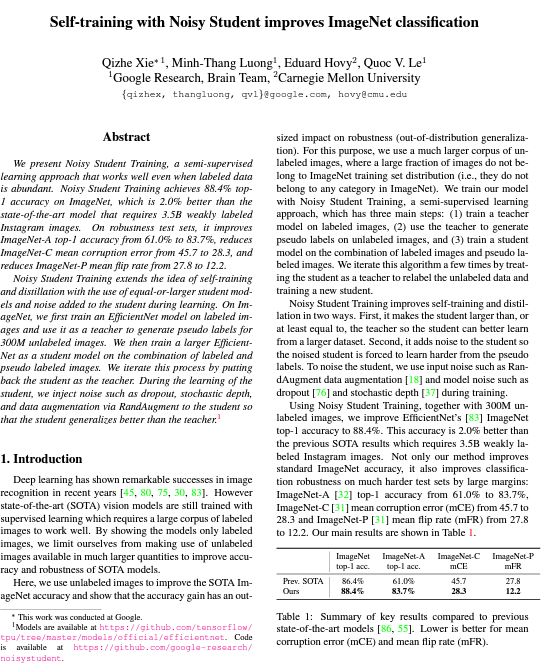
a way improves ImageNet Classification performance
👉 I will apply this way to my project for improving performance
for understanding this method, I Summarized that original paper
List the applied techniques
- python, PyTorch
- Tensor RT
- RTSP ( Real-Time Streaming Protocol )
- private YOLOv5
- Client-Server Communication
- RoboFlow dataset